Due to the complexity of humans, rehabilitation, biological signals, and wearable devices, one large area of development still ongoing with wearable mechatronic arm braces is the method of user control. These devices need to be activated by the user in a way that feels comfortable and natural, while achieving the desired performance criteria. A plethora of control techniques have been proposed in the literature, making it difficult to determine which control method will suit the application best. The objective of the project is to develop and compare control methods to determine optimal solutions for control of wearable mechatronic devices.
Many current methods use combinations of biological signals, such as joint motion, electromyography (EMG) or electroencephalography (EEG), to control the device. This research focuses on implementation and comparison of control methods, such as EMG-based and Hybrid EMG/EEG control models. Currently, no platform exists to allow for efficient implementation and comparison of these control solutions. To support these efforts, software and hardware tools are being developed to make comparison more efficient. Optimal control solutions will be integrated into the embedded control systems of existing wearable mechatronic devices. for musculoskeletal rehabilitation using wearable devices.
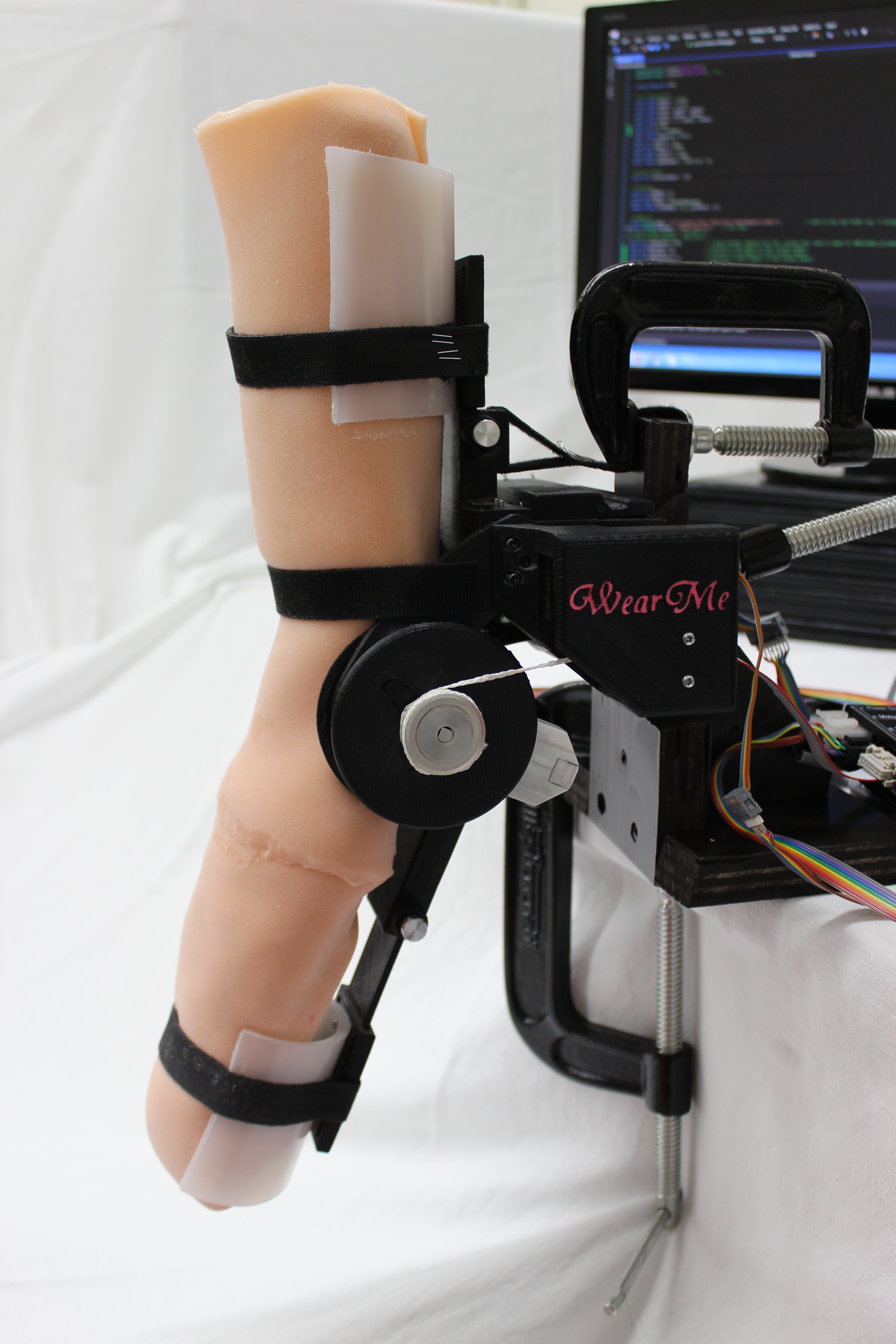
Today, there are countless patients with neuromuscular disorders and injuries. These patients require continuous rehabilitation in order to heal the affected bodily regions without causing permanent disabilities. Past research has shown that the use of mechatronic devices are vastly beneficial to both speed and quality of recovery. My research is focused on the development of wearable exoskeleton devices for upper limb rehabilitation. Specifically, I am designing a standalone mechatronic elbow brace that will be lightweight and thin enough to be worn by a patient for constant rehabilitation throughout their daily lives. The fundamental goal is to have the brace be as unnoticeable as possible to the patient and bystanders.
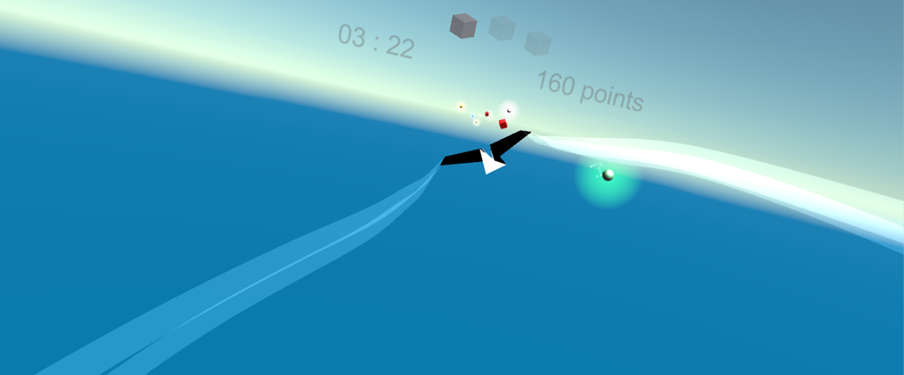
WearME is currently developing a system for neck rehabilitation in collaboration with Western University's School of Physiotherapy, combining a mechatronic device for telerehabilitation and gamification in the form of a VR game. The VR game will allow physiotherapists to modify the game parameters to provide unique and customized exercise regimens, while introducing competitive and reward aspects to improve patient adherence. The mechatronic device will bring at-home rehabilitative neck care beyond body-weight and resistance band exercises by providing resistance to voluntary neck movement.
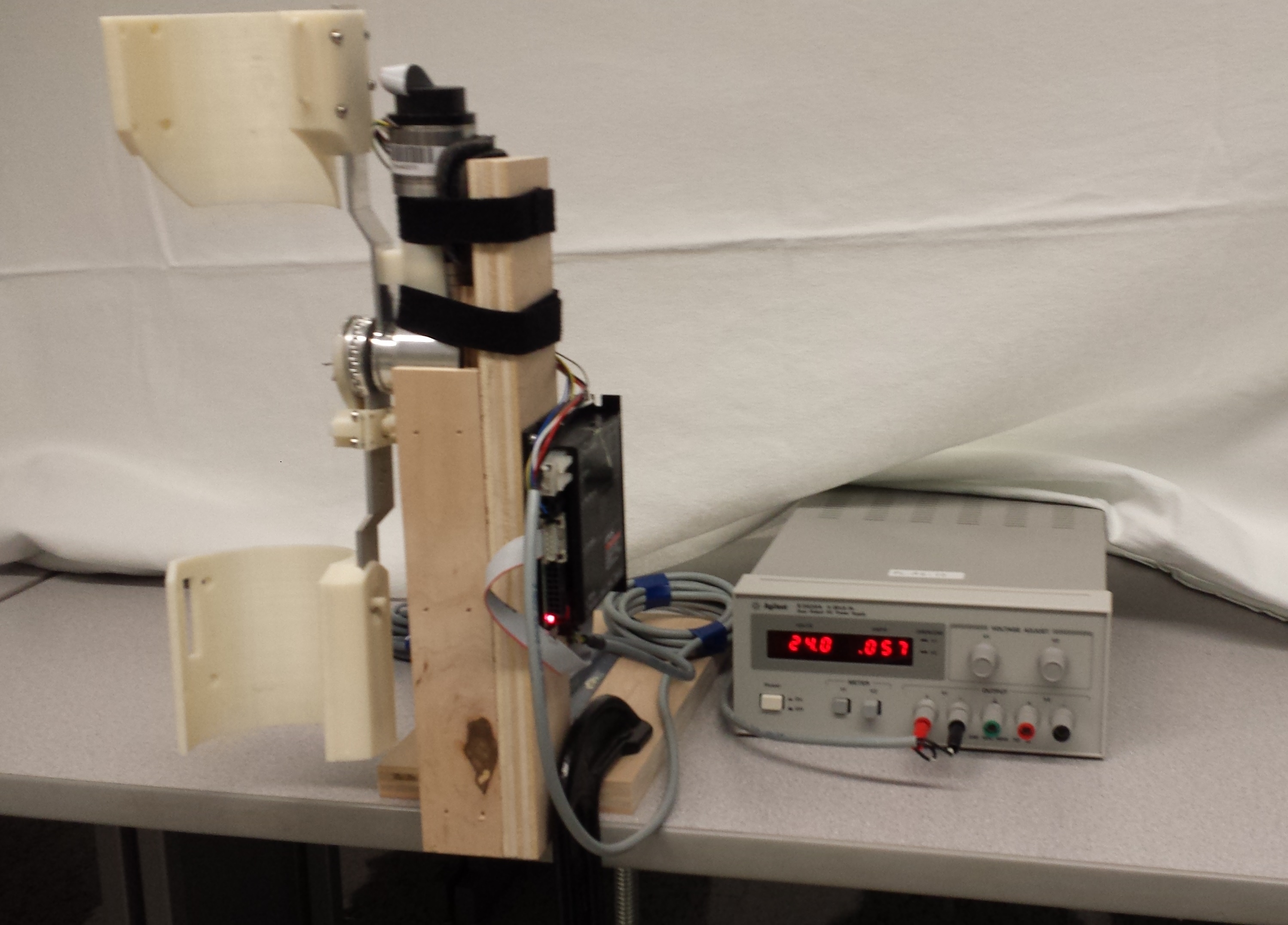
Pathological tremor is described as unintentional, rhythmic, oscillatory movements with a particular amplitude and frequency. The presence of tremor significantly affects the daily life of patients, creating difficulty in many tasks such as eating and writing. More importantly, it often results in social embarrassment which may lead to mental issues. Traditional treatments include medication and brain surgery, but they often associate with side effects and complications. Externally worn exoskeleton-type therapy devices has become a promising alternative over the past decade.
The overall objective of this project is to develop and evaluate a wearable tremor suppression device that is capable of suppressing upper limb tremor while allowing the user’s voluntary motion. The specific objectives are:
1) To conduct a detailed analysis of the collected upper limb tremor data in order to quantify and extract features of tremor.
2) To develop a wearable tremor suppression device
2) To develop a control algorithm that allows the actuation system to maximize the suppression of tremorous motion while minimizing the influence on the voluntary motion.
3) To evaluate the performance of the device.
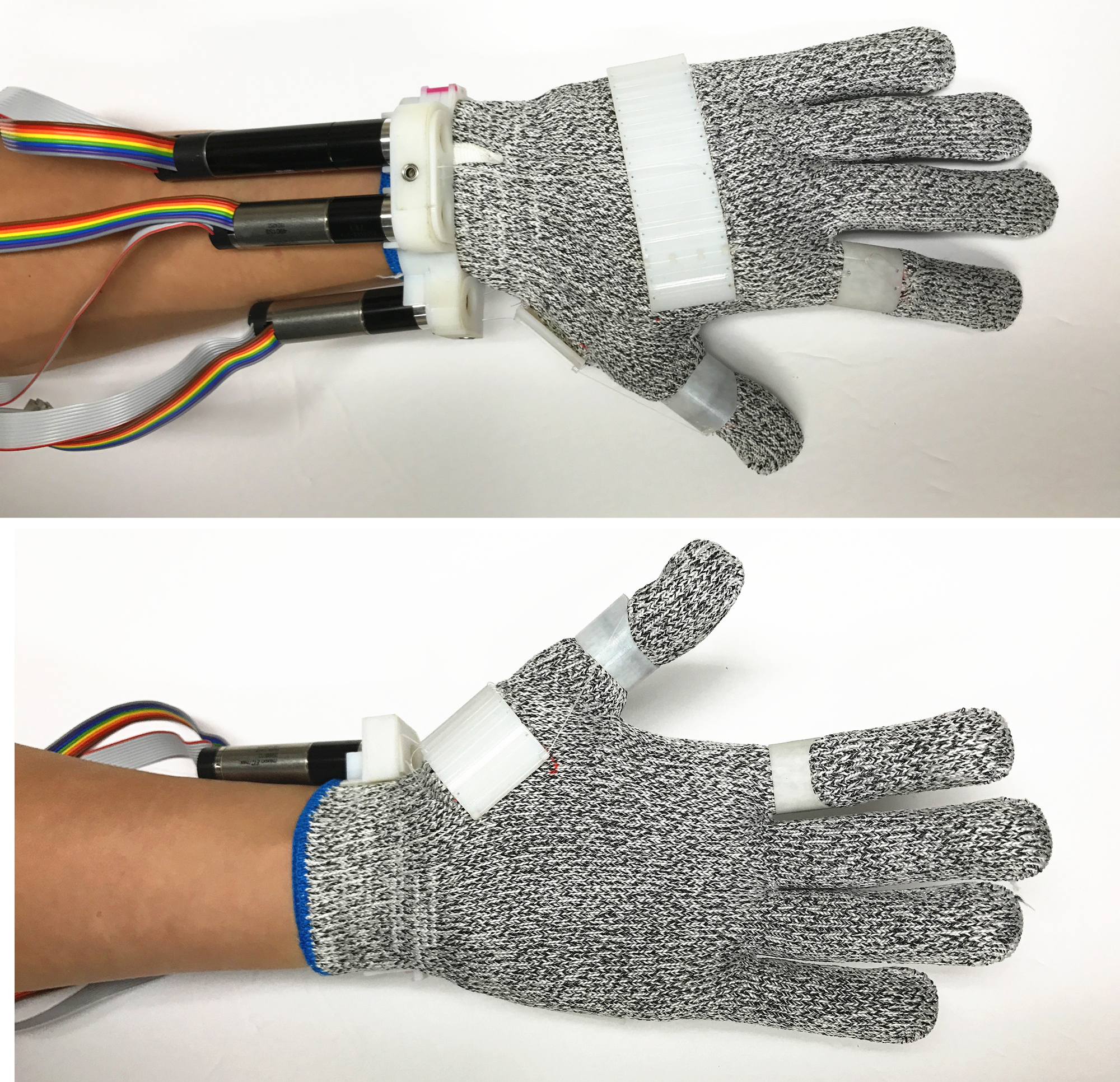
The key issue with wearable technology today is the popular use of stiff electrical motors to actuate the joints. Although these motors perform exceptionally in most situations they do not have form factors that are suited for wearable applications. Since our biological muscles are have unique curvatures and modulate stiffness to provide movement to joints, a wearable exoskeleton should also embody these fundamental properties. Luckily, stiffness modulation and flexibility can be easily reproduced in smart materials like Electro Active Polymers (EAPs) and Shape Memory Alloys (SMAs). Recently a new type of smart material made from hyper twisting silver plated nylon thread that contracts when thermally activated. Due to the high power-to-weight ratio, flexibility, robustness, low cost, and easy fabrication, this twisted coiled actuator (TCA) is a good contender for the actuator of choice in wearable exoskeletons. This project is centered around the biomimetic characterization of the TCA and its integration into a soft exoskeleton design using physical experimentation and numerical methods.

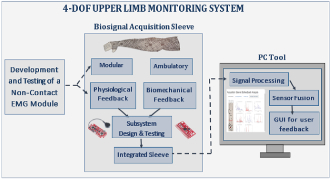
Musculoskeletal disorders (MSDs) of the upper limb greatly limit one’s self-sufficiency by making it challenging to preform activities of daily living required to care for one’s physical well-being, and participate in recreational activities and the workforce. While physical rehabilitation can help restore the limb to the pre-disordered state, at-home patient compliance is low. This is due to lack of resources, motivation, and markers of progress. A wearable monitoring tool can be used to increase compliance by increasing the user’s sense of agency through access to quantifiable metrics of their recovery.
The objective of this research is to develop and validate such a system for the upper limb. It will contain an untethered, modular signal acquisition sleeve, which collects and stores physiological, biofeedback, and temperature data. In order to obtain accurate, low-noise electromyography (EMG) signals comfortably, this work will include the development and validation of a custom non-contact EMG module will be developed to insert into the sleeve. The collected data will be integrated through multi-modality sensor fusion techniques such that it can be presented to the user in a meaningful manner. This feedback will be accessible to the user and clinician via a PC tool for the visualization of condition-relevant biometrics.
According to the World Health Organization, stroke is the third leading cause of disability. Furthermore, a common consequence of stroke is hemiparesis, which leads to the impairment of one side of the body and affects the performance of activities of daily living (ADL). It has been proven that targeting motor impairments as early as possible while using exoskeletons as a robot assisted therapy, and letting the patient be in control of the robotic system, can improve the rehabilitation outcomes. However, despite the increased progress in control methods for exoskeletons, a need for a more natural interface that allows a better human machine interaction (HMI) remains. This research is focused on the use of machine learning algorithms to classify different hand and wrist gestures detected by a commercially available gesture recognition device. The final goal of this project is to use these gestures to control a wearable mechatronic device during bilateral training of hemiparetic stroke patients.
The development of wearable mechatronic braces offers the potential for improved mobility and recovery following trauma. Electromyography (EMG), the study of the electrical currents generated during muscle contraction, can act as an interface between patient and device. We are studying how to improve EMG sensing calibration to detect a user’s intended motion while interacting with their environment. The objective is to improve motion classification accuracy while performing unconstrained movements with various velocities, forces, and limb positions. We are also developing EMG classification models that will allow the braces to assess and monitor patient muscle health. This will lead to improved diagnostics and the development of individualized therapies. The EMG patterns and classification models will be integrated into the control system of a wearable mechatronic brace to monitor patient health and motion intention.


