
CSTAR
London Health Sciences Centre University Hospital
339 Windermere Road
London, ON
N6A 5A5
Phone: 519-663-3111
or 519-685-8500 ext. 33111
Fax: 519-663-8401
Lung cancer remains the most common cancer and the most common cause of death from cancer in North America. Secondary effects of treating cancer may be mitigated through a minimally invasive approach. While promising, all minimally invasive surgery and therapy (MIST) methods suffer from the same problem: without direct access to the target tissues, reliable and accurate tumour localization remains a formidable challenge.
The objective of this research is to develop and validate a system for MIST, with particular emphasis on lung cancer, that enhances currently available minimally invasive approaches through the development and integration of specialized mechatronic tools, tracked and fused kinesthetic, tactile, and intraoperative US data, and preoperative CT imaging. This will involve a comprehensive assessment of image-based tumour localization in the context of minimally invasive access, and mechatronic devices for delivering therapy and providing sensory feedback. This work focuses on the lung as it is the most challenging organ to treat; however, its use can be extended to other solid organ tumours and to soft tissues.
 Robotics-assisted brachytherapy
Robotics-assisted brachytherapy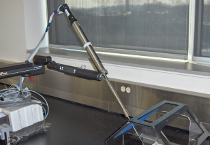 MIS brachytherapy device
MIS brachytherapy device Needle guidance software
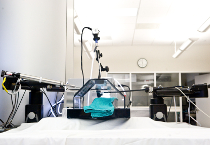
Needle guidance software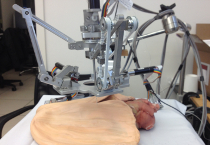 Chest-mounted parallel robot for cancer treatment
Chest-mounted parallel robot for cancer treatment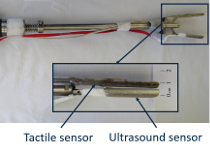 Instrument for multisensory articulated palpation
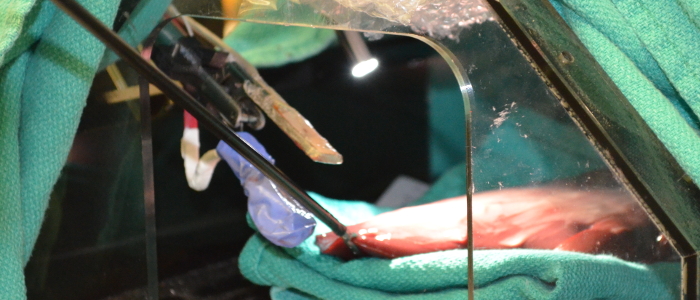
Instrument for multisensory articulated palpation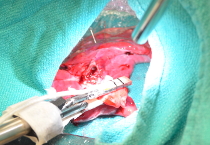 Minimally invasive tissue palpation
Minimally invasive tissue palpation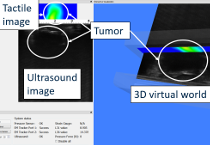 Tumour localization software
Tumour localization software